
ملخص
الرافعة الجسرية، والمعروفة باسم "القيادة"، هي نوع من آلات الرفع المستخدمة على نطاق واسع في المؤسسات الصناعية والتعدين، وتتكون آلية تشغيلها من ثلاثة أنظمة قيادة مستقلة بشكل أساسي، ونظام قيادة السيارة، ونظام قيادة الخطاف، وعاكس K-DRIVE إلى أعلاه تم إصلاح نظام القيادة الثلاثة بنجاح، فيما يلي وصف أساسي لعملية تحويل القيادة قبل نظام المشي وبعده.

مخطط المزايا
- التحكم في ناقل التيار ذو الحلقة المفتوحة الموجه ميدانيًا، ومتغيرات المحرك المنفصلة تمامًا، وعزم الدوران الكبير منخفض التردد، والاستجابة السريعة، وما إلى ذلك؛
- KD600 يعتمد وضع التحكم في ناقل الحركة ذو الحلقة المفتوحة الحر PG ووضع V/F الموجه، ويضخم تكوين مستوى الطاقة للترس الأول؛
- نطاق التردد: إعداد الجزء 0.5-600 هرتز، التعديل المستمر المستمر؛
- نطاق جهد التشغيل: 380 فولت ± 20%، وينخفض جهد الحافلة إلى 360 فولت تيار مستمر على الفور من أجل التشغيل بدون مشاكل؛
- سعة التحميل الزائد: 150% من التيار المقنن، مسموح بدقيقة واحدة؛ التيار المقدر بنسبة 200%، مسموح بـ 1 ثانية؛
- خصائص عزم الدوران: عزم الدوران المبدئي، أكبر من مرتين من عزم الدوران المقدر؛ عزم دوران منخفض التردد، أكبر من 1.6 مرة من عزم الدوران المقدر عند 1 هرتز؛ عزم الكبح أكبر من عزم الدوران المقدر.
خصائص التشغيل
- تتميز آلية رفع الرافعة بعزم دوران كبير، والذي عادة ما يتجاوز 150٪ من عزم الدوران المقدر. إذا تم أخذ الحمل الزائد وعوامل أخرى في الاعتبار، فيجب توفير 200% على الأقل من عزم الدوران المقدر أثناء عملية البدء والتسارع؛
- عندما تعمل آلية الرفع للأسفل، سيكون المحرك في حالة توليد الطاقة المتجددة ويجب أن يكون مكابح استهلاك الطاقة أو ردود فعل متجددة للشبكة؛
- يتغير حمل آلية الرفع بشكل كبير عندما يترك الجسم المرفوع الأرض أو يلمسها، ويجب أن يكون محول التردد قادرًا على التحكم في حمل التصادم بسلاسة؛
- نظرًا لأن سرعة الحركة لآلية الحركة الأمامية والخلفية للرافعة ليست عالية أثناء التصميم الميكانيكي، فيمكن استخدام المحول للسرعة الزائدة المناسبة لتحسين كفاءة العمل.
مخطط الأسلاك بسيط
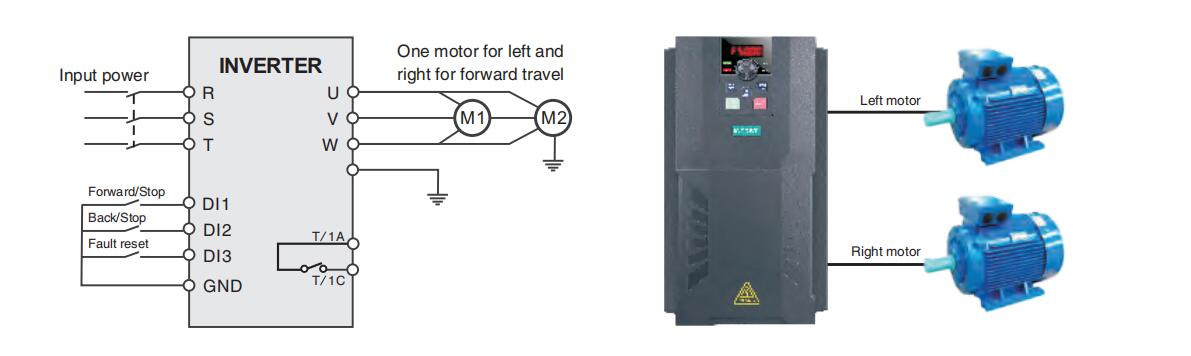
المعلمة سيتينانوغرام والوصف(معلمات السفر للمحرك الأيسر والأيمن)
| المعلمة | يشرح | إعداد المعلمة | يشرح |
| P0-00=0 | التحكم في VF | P5-00=1 | إلى الأمام |
| P0-04=1 | توقف المحطة الخارجية | P5-01=2 | نفذ لاحقا |
| P0-06=1 | ضبط التردد الرقمي | P6-00=2 | تتابع 1 خطأ الإخراج |
| P0-14=60.00 | الحد الأقصى للتردد | P4-01=1.6 كيلو واط | قوة المحرك متصلة |
| P0-16=60.00 | تردد الحد الأعلى | P4-02=380 فولت | المحرك الجهد المقنن |
| P0-11=60.00 | تردد الإعداد الرقمي | P4-04=3.3A | المحرك المقدر الحالي |
| P0-23=3.0s | وقت التسارع | P4-05=50 هرتز | التردد المقدر للمحرك |
| P0-24=2.0s | وقت التباطؤ | P4-06=960R/دقيقة | السرعة المقدرة للمحرك |
| ملاحظة: عند استخدام محول تردد واحد مع محركين، يوصى بشدة بتثبيت مرحل حراري مطابق في الطرف الأمامي لكل محرك لحماية كل محرك. | |||
تحليل تأثير التشغيل
قام محول التردد من سلسلة KD600 بتنفيذ تحويل تحويل التردد على نظام السفر، وكان تأثير tr-ansformation مثاليًا نسبيًا، وهو موضح بشكل أساسي في:
- يتم تحقيق البداية الناعمة والتوقف الناعم أثناء بدء التشغيل، مما يقلل من التأثير على شبكة الطاقة؛
- بعد استخدام محول التردد، يتم حذف موصل التحويل الأصلي ومقاوم تنظيم السرعة، مما لا يوفر تكلفة الصيانة فحسب، بل يقلل أيضًا من وقت التوقف عن الصيانة، وبالتالي زيادة الإنتاج؛
- عندما يعمل الخطاف الرئيسي عند 5 هرتز ~ 30 هرتز، يكون تأثير توفير الطاقة واضحًا جدًا؛
- يتم استخدام محول التردد للتحكم في الحركة الأمامية والخلفية، ويمكن لسلسلة آلية الحركة اليسرى واليمنى تحقيق عمل التردد الزائد. في ظل فرضية ضمان السلامة، تم تحسين كفاءة العمل بشكل كبير، كما تم أيضًا تقليل عبء عمل الصيانة لمعدات السفر بسبب الاستبدال المتكرر لموصلات التيار المتردد.
الملاحظات الختامية
يتم استخدام محول التردد للتحكم في المشي الأمامي والخلفي وسلسلة آلية المشي اليسرى واليمنى، والتي يمكنها تحقيق عمل رفع تردد التشغيل، وتحسين كفاءة العمل بشكل كبير في ظل فرضية ضمان السلامة، وكذلك تقليل عبء عمل صيانة معدات القيادة بسبب الاستبدال المتكرر لموصلات التيار المتردد.
موقع التطبيق

وقت النشر: 17 نوفمبر 2023